
Abstract:
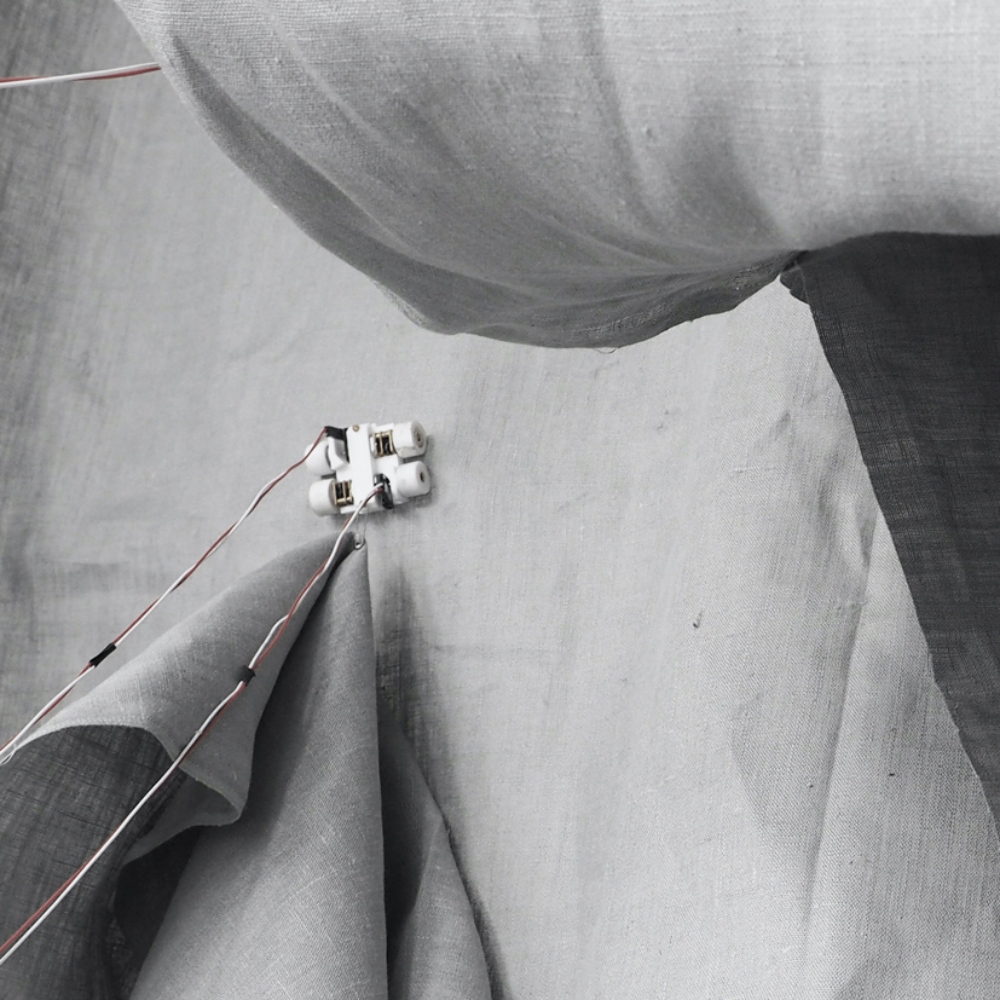
The research presented in this paper explores how textiles can be formed into adaptive, kinematic spaces to be able to respond to its environment and users utilizing on-site, distributed, mobile robotic connectors. The project aimed at creating an adaptive system that consumes little energy while making use of textiles’ advantageous qualities—their lightweight, portability, and manipulability. This was achieved through the development of a bespoke on-material mobile machine able to locomote on suspended sheets of fabrics while shaping them. Together, the connector and the tectonic system compose a lightweight architectural robot controlled with a feedback loop that evaluates real-time environmental sensor data from the space against user-defined targets. This research demonstrates how the combination of mobile robotics and textile architecture opens up new design possibilities for adaptive spaces by proposing a system that is able to generate a significant architectural effect with minimal mechanical actuation.