Project Gallery



[Design For] Robotic Assembly of Modular Timber Structures
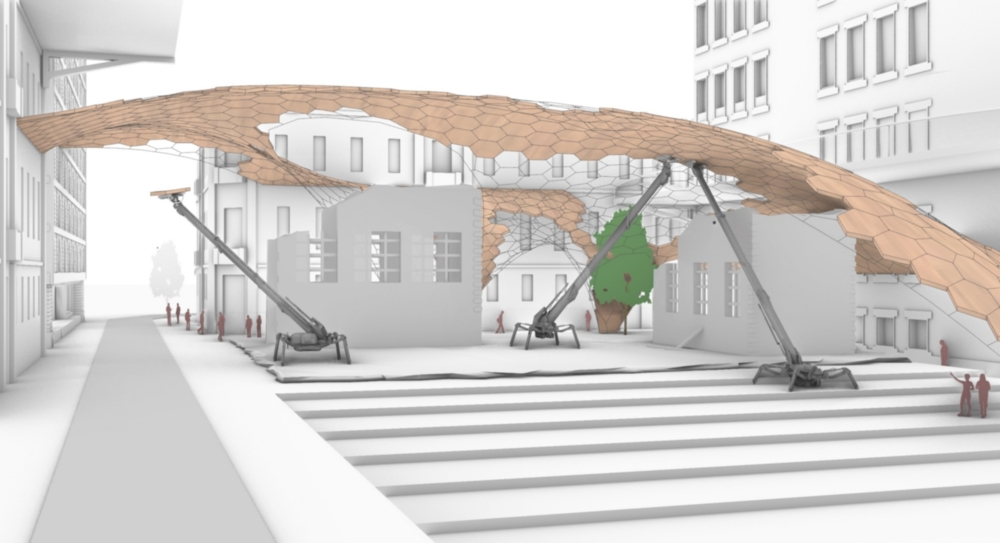
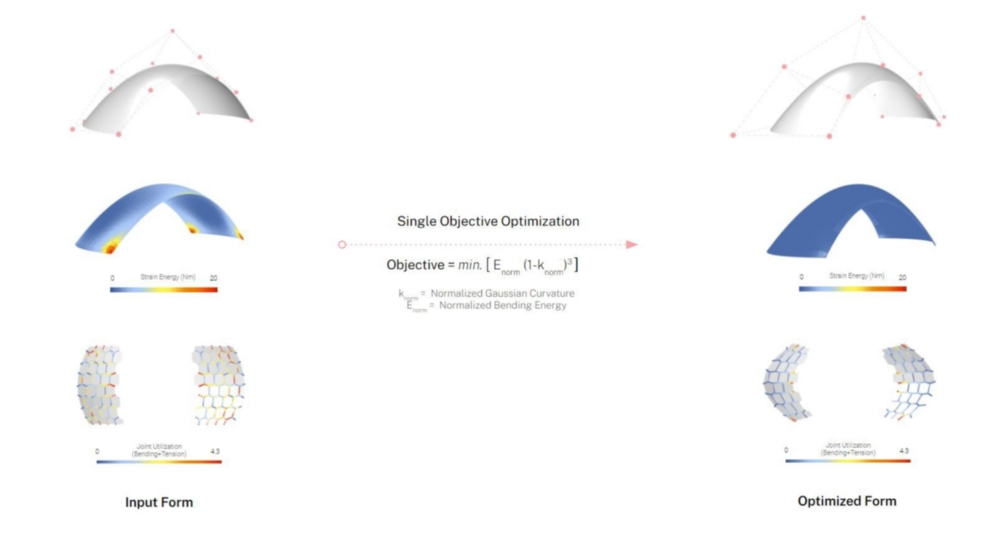
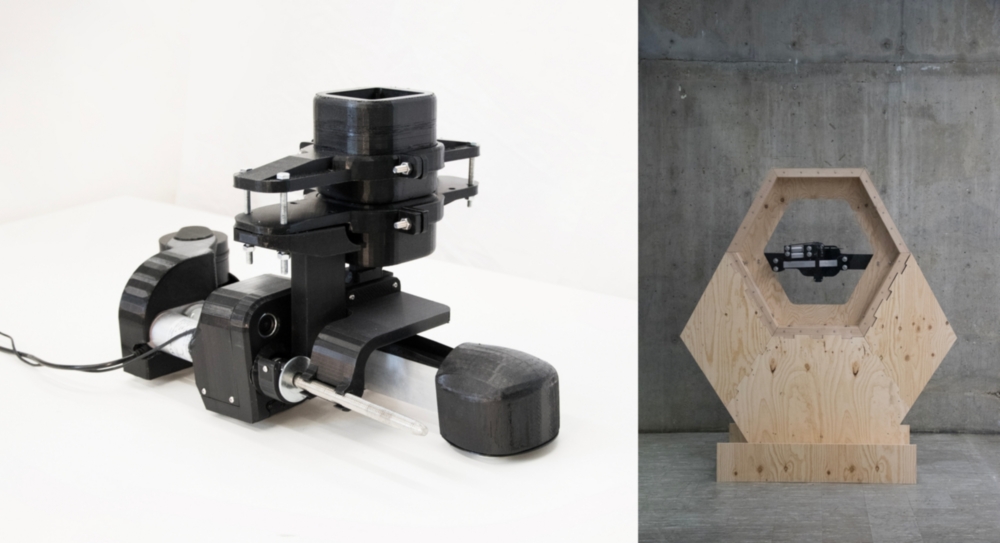
This research demonstrates a novel robotic assembly system for the construction process of modular timber structures. In addition to the significant environmental, design and fabrication-related benefits of those structures, segmented timber shells in particular are highly material efficient and suitable for large-span applications.
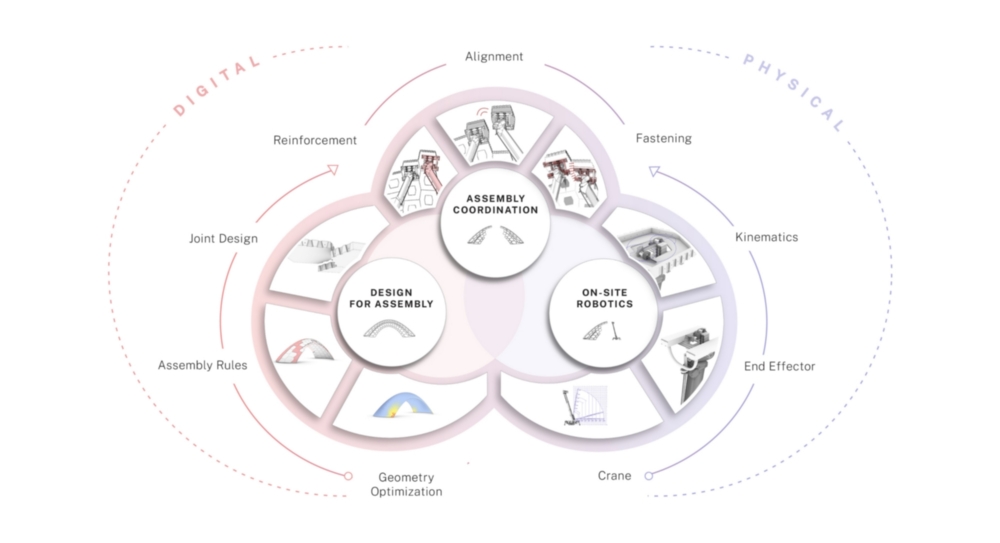
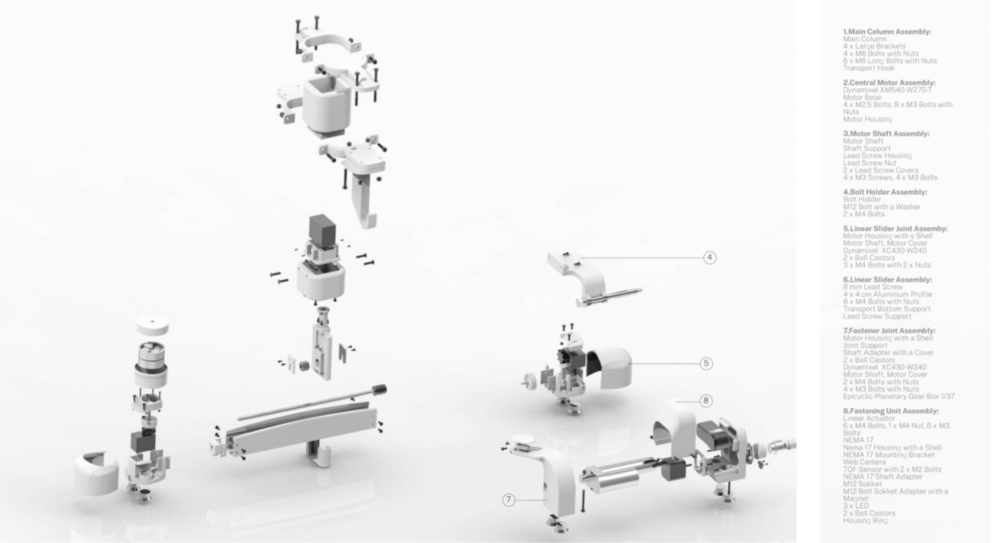
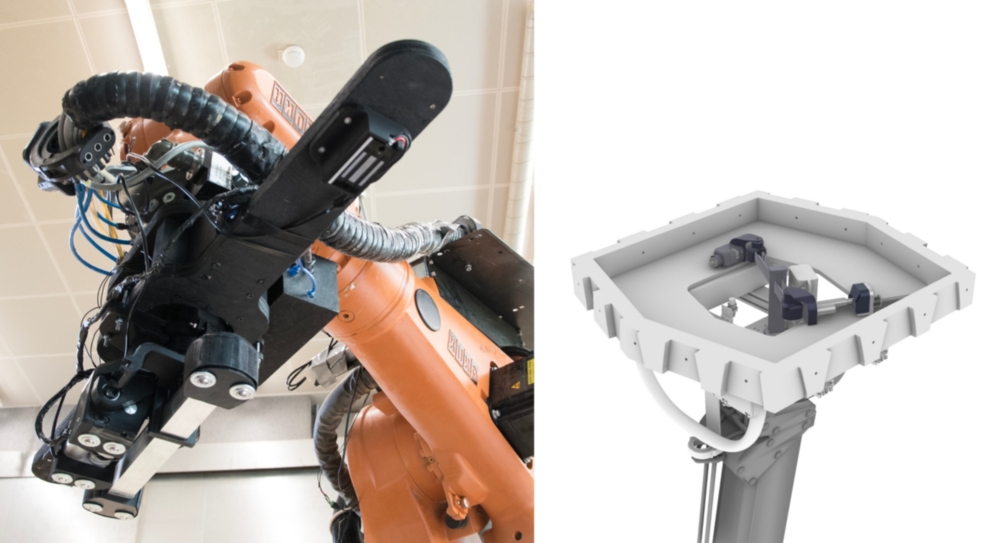
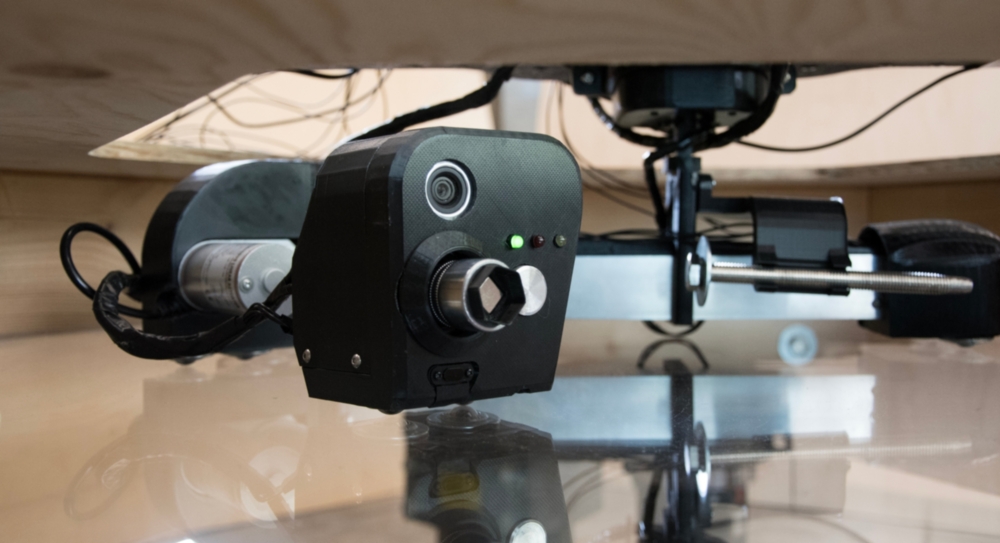
Nevertheless, the requirement of falsework and the high number of connections result in their labor-intensive assembly. The proposed system reimagines the reciprocity between the design, the on-site robotics and the coordination of the on-site equipment as a structurally-informed design for assembly methodology. This methodology brings the possibility of automated erection and reduced amount of falsework with a robotic in-situ joining strategy, while bringing unexplored design possibilities beyond the capacity of the on-site workers.
Consequently, it rethinks the notion of buildings as effectively assembled and disassembled systems. The concept can also be extended to structural systems beyond segmented timber shells such as slabs, or to different material systems where the subject of labour-intensive assembly still exists.
ITECH M.Sc. Thesis Project 2021: [Design For] Robotic Assembly of Modular Timber Structures
Anastasia Malafey, Ekin S. Şahin, Anand N. Shah
Thesis Advisers: Simon Bechert, Mathias Maierhofer
Thesis Supervisor: Prof. Jan Knippers
Second Supervisor: Prof. Achim Menges