
{kind=link}
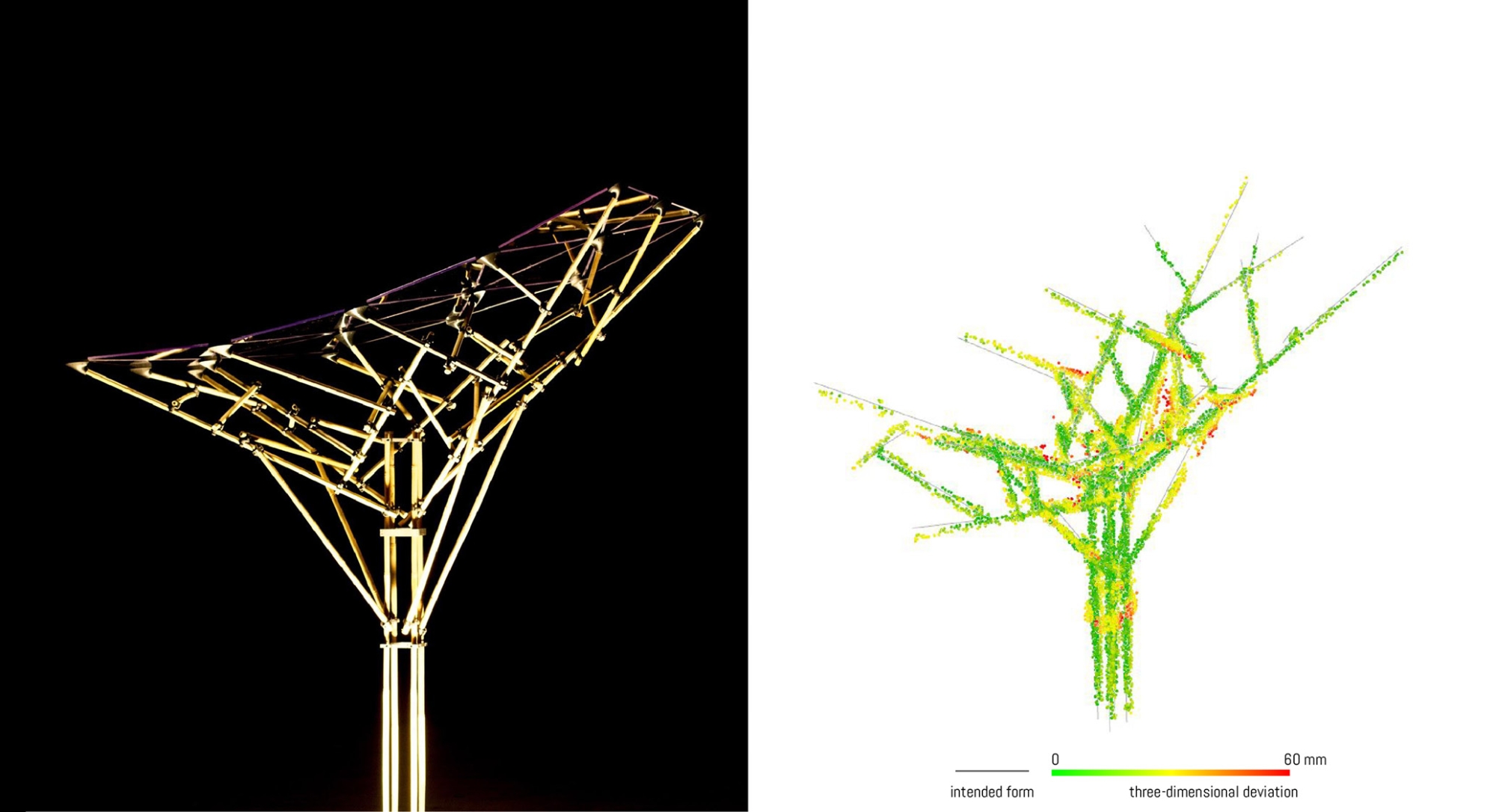
This thesis aims to investigate an adaptive fabrication system, which can perform robustly under different sources of uncertainties. Instead of being pre-defined as in stereotypical linear construction processes, the designed form and fabrication instructions are adaptively generated during the fabrication process. In this way, various sources of uncertainties can be taken into consideration through sensory feedback of both building components and in-progress structure. Given the as-built status, the adapted solution can be optimized to fulfill given design intentions while satisfying necessary constraints. The potential of the system is illustrated through a case study of manually assembled bamboo structures with vision-based sensing, since predictable results are not easily achievable with conventional methods due to the imprecision of the material and manual operations. Following the proposed fabrication framework, computational tools are developed for sensor localization, sensory data interpretation, adaptive design generation and assembly augmentation. An RGBD camera localized by a set of fiducial markers, is used to capture raw sensory data for constructing the geometry of bamboo segments. Together with design intention and connection constraints, the pose of the bamboo elements are optimized with the method of sequential quadratic programming. The same sensor is used to provide real-time visual guidance for the assembly. A web-based graphical user interface is developed, which makes sophisticated computational tools leverageable by average users. The final demonstrator is a pavilion scale tree-like complex structure, which fulfills the intended boundary condition thus can successfully interface with prefabricated roof panels. With this specific example, one can envision this system augmenting vernacular materials and processes to produce comparable results as modern counterparts, hence enabling their usage in modern applications to a larger extent. Future research direction of this project is to extend the capability of this system in order to enable a more robust, collaborative and efficient in-situ fabrication process.
Project Gallery












ITECH M.Sc. Thesis Project 2020: Working with Uncertainties - An Adaptive Fabrication System for Bamboo Structures Utilizing Computer Vision
Yue Qi, Ruqing Zhong
Thesis Advisers: Hans Jakob Wagner, Yasaman Tahouni
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers
with support of: Benjamin Kaiser (ISW)