
{kind=link}
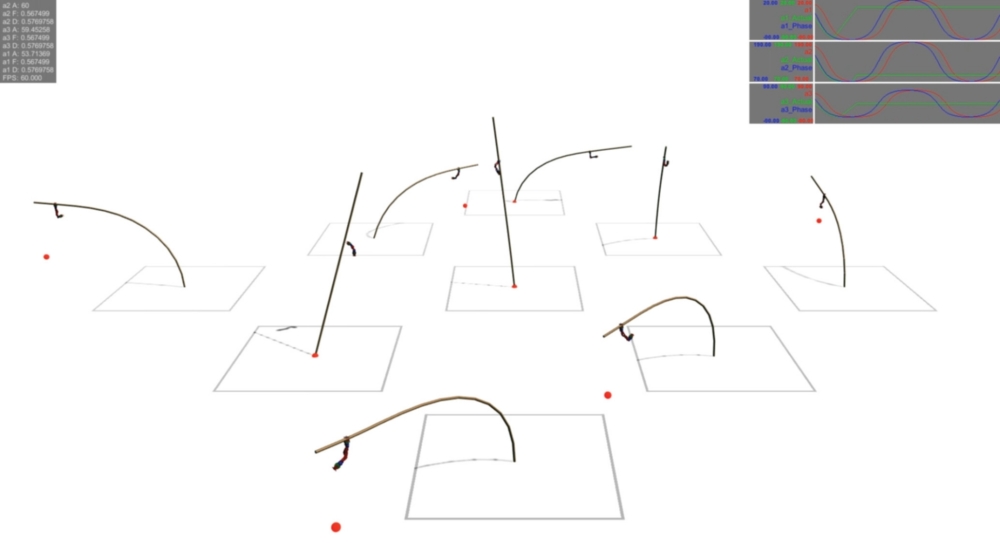
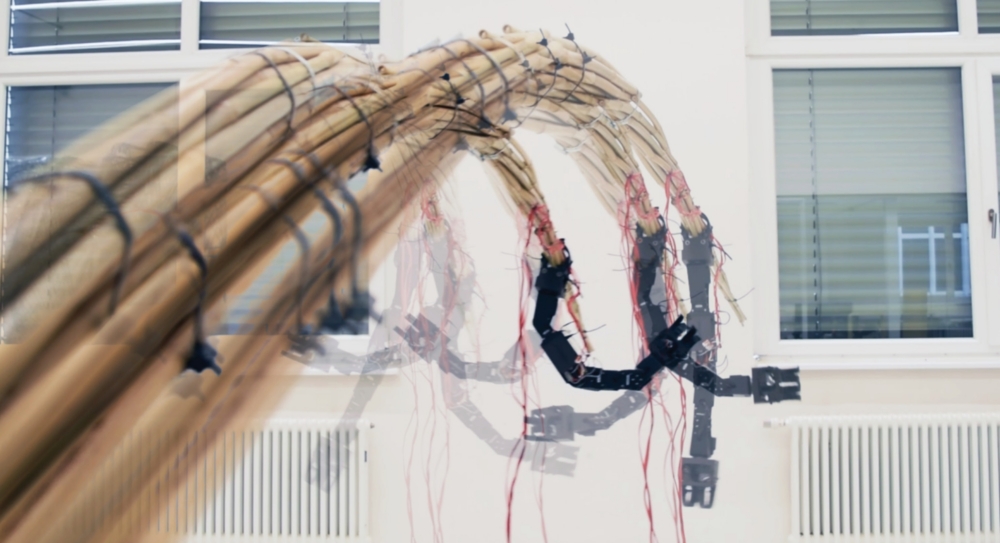
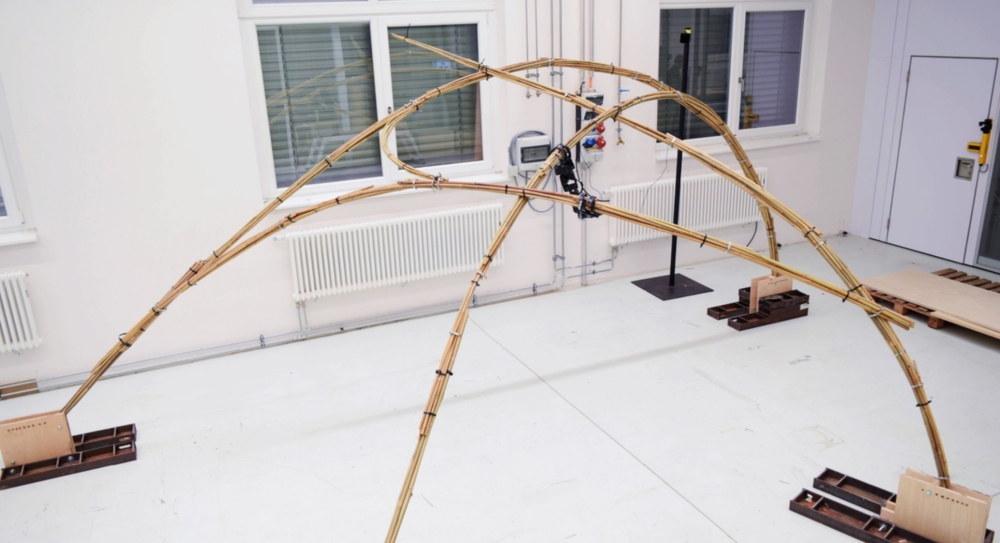
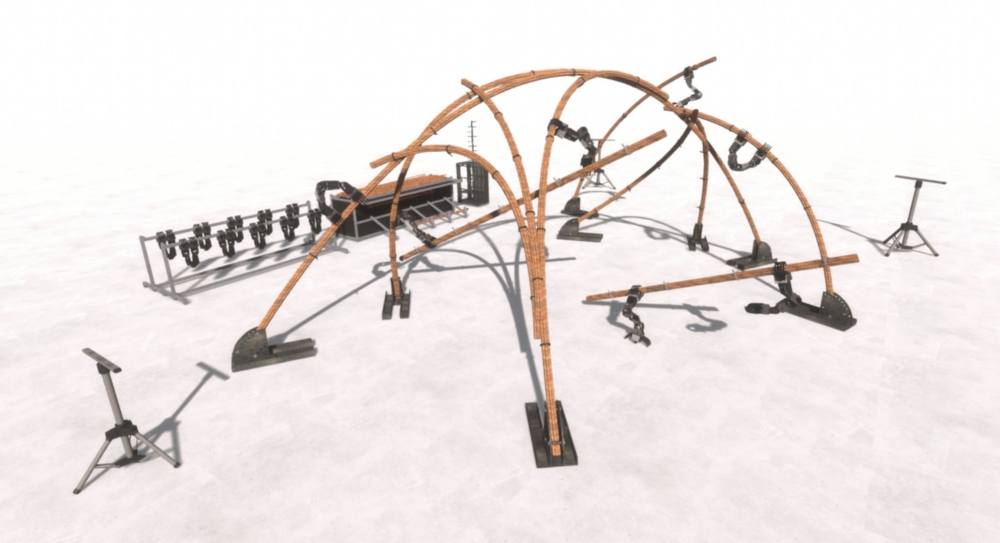
The project presents a novel approach to designing autonomous construction systems by leveraging material-robot behaviors. This approach involves teaching robots how to act relative to the way a material behaves, and using this behavioral relationship as a driver of design and assembly. A case study is conducted where mobile robots are trained using deep reinforcement learning algorithms to develop an intuition for elastically bending bundles of bamboo into designated configurations. This intuition, or neural network policy, is then used in the process of designing structures, and for the in-situ assembly of these designs. Thus, the proposed approach demonstrates a shift from absolute control and predictability to intuition and behavior based methods, meaning materials and processes that are not currently used in construction can be reconsidered.
This topic is highly interdisciplinary. By combining machine learning, material simulation, and mobile robots, the project falls within four fields: Architecture, Systems Engineering, Computer Science, and Robotics. This thesis provides research advancements in these domain specific regions, while also concluding with insights into how they can play off of each other, leading to more co-designed methodologies.
Project Gallery







ITECH M.Sc. Thesis Project 2020: Co-Designing Material-Robot Behaviors - Systems for Autonomous Construction
Grzegorz Łochnicki, Nicolas Kubail Kalousdian
Thesis Advisers: Samuel Leder, Mathias Maierhofer
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers
with support of: Dr. Salih Özgür Öğüz (IPVS)
This project was developed in part through the Autodesk Research Residency Program.
The Autodesk Research Residency Program is a research and development program where a diverse global community of innovators from industry, academic, and entrepreneurial sectors collaborate to design, make, and de-risk the future together.