
{kind=link}
This research explores the ideas of human robot collaboration in art and architecture for the purpose of expanding the ways we work and design with material systems in partially automated workflows. The aim was to develop a custom framework to enable intuitive human robot collaboration moving toward the synthesis of design and fabrication spaces which could be expanded in future applications. And in the process, “expanded the way designers are thinking about the dynamism of material manipulation.”
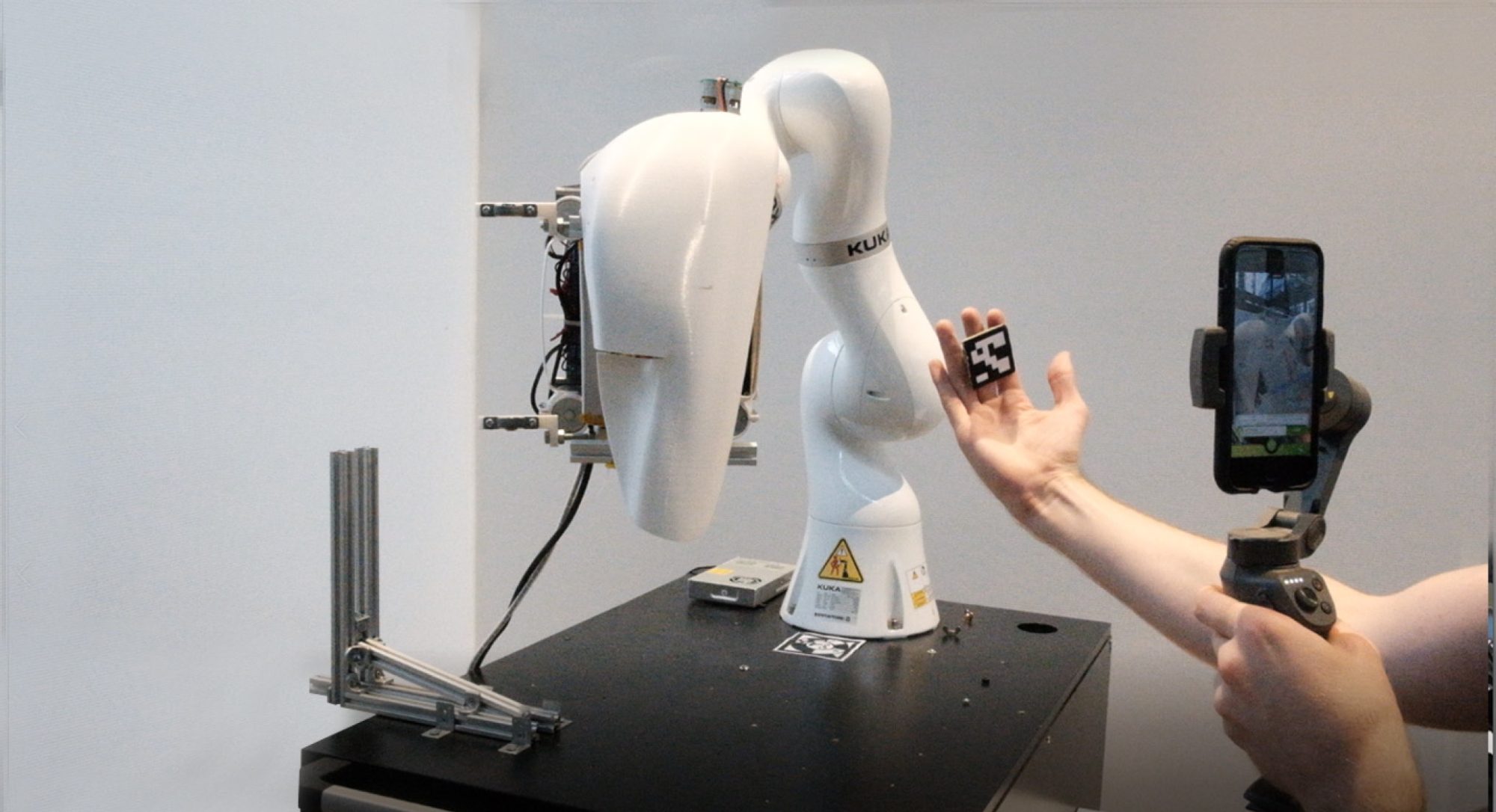
Through the development of a case study material system, heat pressing thermoplastic textiles the research developed general and specific methods of spatial programming collaborative industrial robots to produce a human scaled free standing thermoplastic textile artifact. In so doing, demonstrating the developed framework’s intuitive real-time robotic programming. Through a shared coordinate system 3d digital geometries were spatially drawn using a custom developed Augmented Reality (AR) ISO application on the user’s phone and shared with the robot in real
time. Through a custom developed Robotic Operating System (ROS) cloud webserver the robot could then analyze and process the user’s digital design either in place or in a separate processing zone which can be positioned on the fly user defined poses through 2d image recognition. Enabling joining, adjusting and refining the workpiece. The step by step design and fabrication workflow highlighted the potential to benefit from human intuition and design judgement and robotic precision and flexibility moving towards new intuitions. Ultimately this research developed a custom communication and interaction platform for human robot collaboration which is accessible through a smart phone in anticipation for a future where partially automated workflows could greatly benefit robotic and human efficiency. A future where human creativity and intuition can be expanded through robotic systems not replaced.
Project Gallery












ITECH M.Sc. Thesis Project 2020: Augmented Robotic Craftsmanship - Enabling collaborative robotic fabrication through augmented spatial design of thermoforming textile
James Hayward, Shu Chuan Yao
Thesis Advisers: Mathias Maierhofer, Yasaman Tahouni
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers